テスラが人間の目から着想を得た「自己洗浄カメラシステム」を開発中だと伝えられている。自動運転車のカメラレンズを清潔な状態に保つことで自動運転システムの性能と安全性が向上するため、今後はロボタクシーやヒューマノイドロボットのOptimus(オプティマス)への適用可能性も指摘されている。
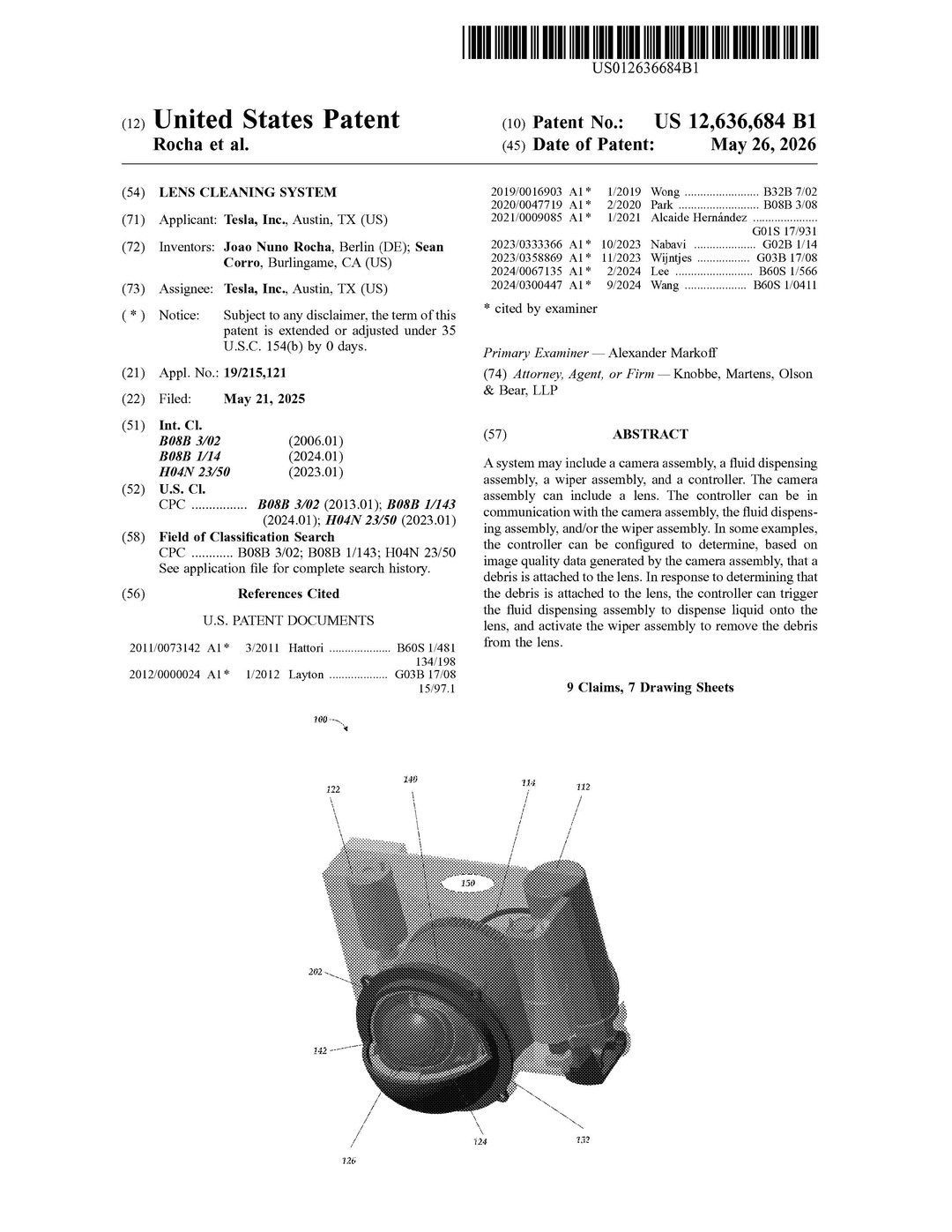
米国で公開された特許によると、テスラは既存のカメラウォッシャーシステムより進化した形の自己洗浄カメラ技術を構想しているとのことだ。このシステムは人間のまぶたと涙腺の仕組みから着想を得た構造が特徴だ。
テスラは2016年、自社車両がすでに自動運転に必要なハードウェアを備えており、残る課題はソフトウェアと規制のみだと主張した。しかしその後、最新のFSD(Full Self-Driving)機能を旧型ハードウェアが十分にサポートできないという指摘が出て、この主張は長らく論争の的となった。
自動運転の実現において、予想以上に重要な問題として浮上した要素もある。それは車両外部のカメラを常に清潔に保つことだ。テスラはカメラベースの運転支援システムを積極的に採用しているため、レンズにほこりや雨水、泥などが付着すると認識性能が低下する可能性がある。
ロボタクシーテストで露呈したカメラ汚染の課題
この問題は米テキサス州オースティンで実施された初期ロボタクシーテストでも浮き彫りになった。初期テストには量産型のモデルY車両が使用されたが、その後一部の車両にバックカメラとサイドリピーターカメラ用のウォッシャーシステムが追加されているのが確認された。これについて一部では、テスラが悪天候時のカメラ汚れの問題をやや遅れて認識したのではないかとの見方もある。
既存のカメラウォッシャー方式はレンズにウォッシャー液を高圧で噴射する構造だ。これは比較的単純だが、洗浄液の消費量が多く、頻繁な補充が必要という欠点がある。人間の介入を最小限に抑えるべき無人ロボタクシーのような車両では、こうした維持管理の負担がより大きな問題となる可能性も指摘されていた。
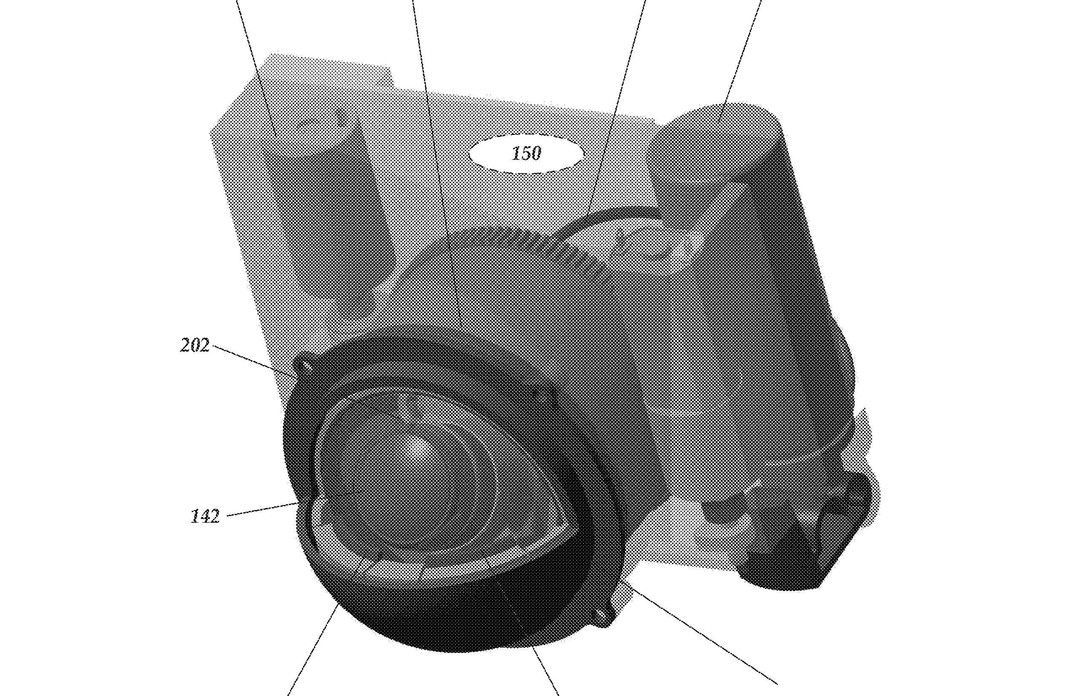
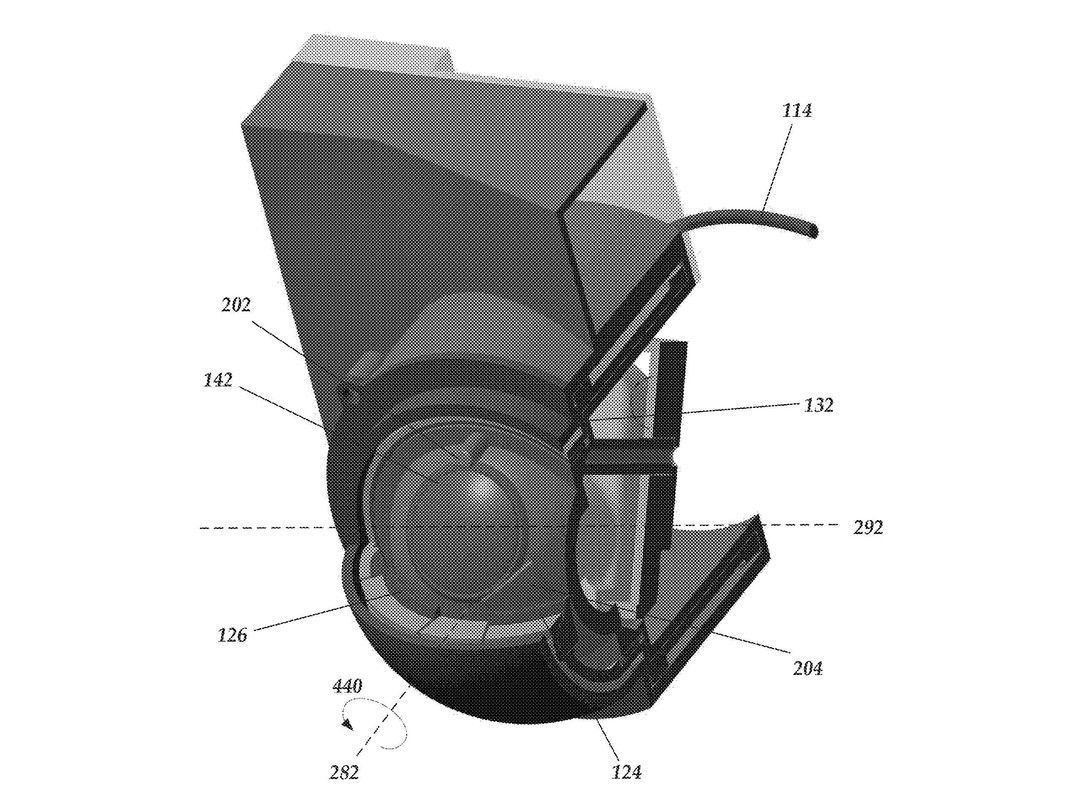
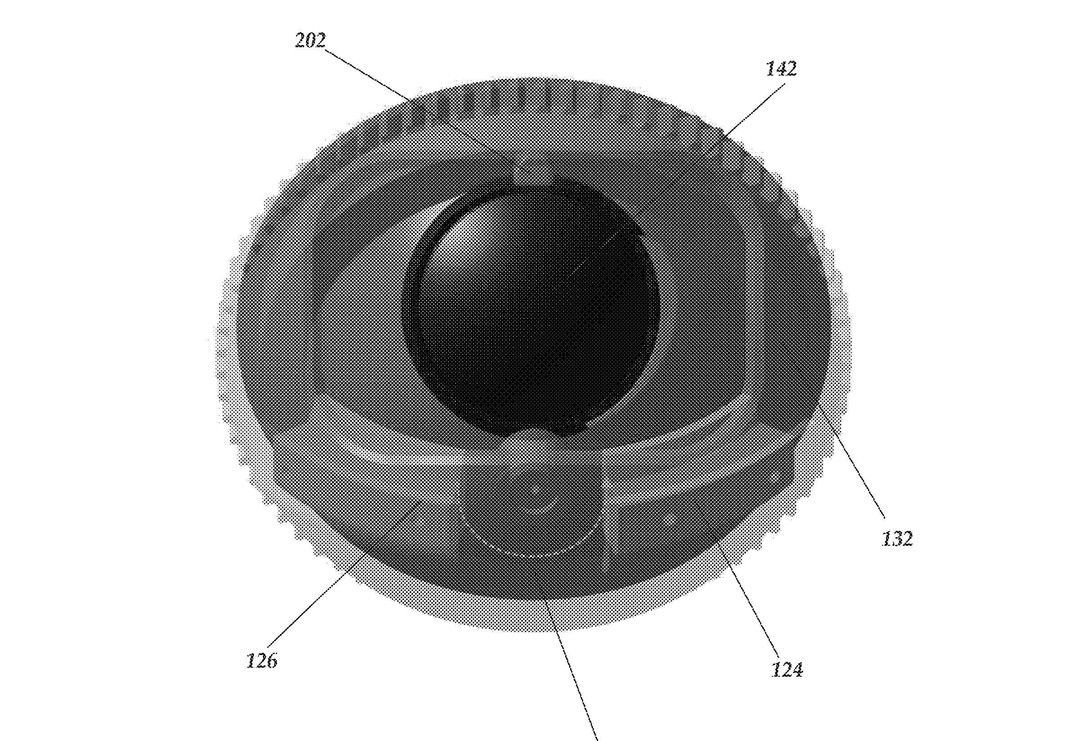
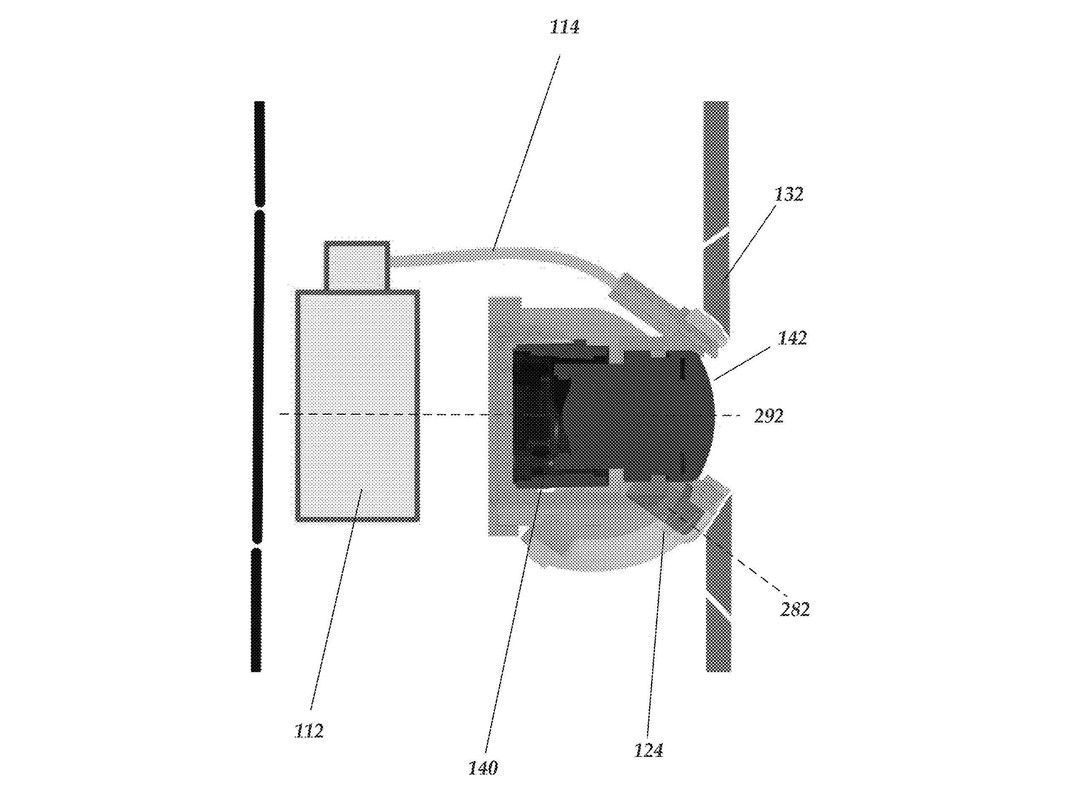
今回公開された特許はこうした限界を軽減するための代替案と見られる。特許文書には人間の目に似た形状と動作原理を備えた自動カメラレンズ洗浄システムが記載されている。高圧でウォッシャー液を噴射する既存の方式に代わり、レンズ表面を拭き取る特殊設計のワイパーを採用したものだ。このワイパーは人間のまぶたに似た役割を果たす。
システムは依然としてウォッシャー液を使用するが、人間の涙が目を潤すように極めて少量の液体だけでレンズを洗浄する方式だ。これによりウォッシャー液の使用量を抑え、補充の頻度を下げられるとしている。この特許は2025年5月に出願されており、時期的にテスラがオースティンでロボタクシーの運営を準備していた時期と一致する。
涙を模倣した自己洗浄メカニズムの仕組み
特許説明によると、テスラはカメラ映像の品質を基にレンズの汚れ具合を感知する方式を構想しているという。映像品質が一定の水準以下に落ちると、システムが自動的に洗浄手順を実行する。その後、必要な量のウォッシャー液をレンズに供給し、まぶたの役割を果たす装置がレンズ表面を拭き取って汚れを除去する。
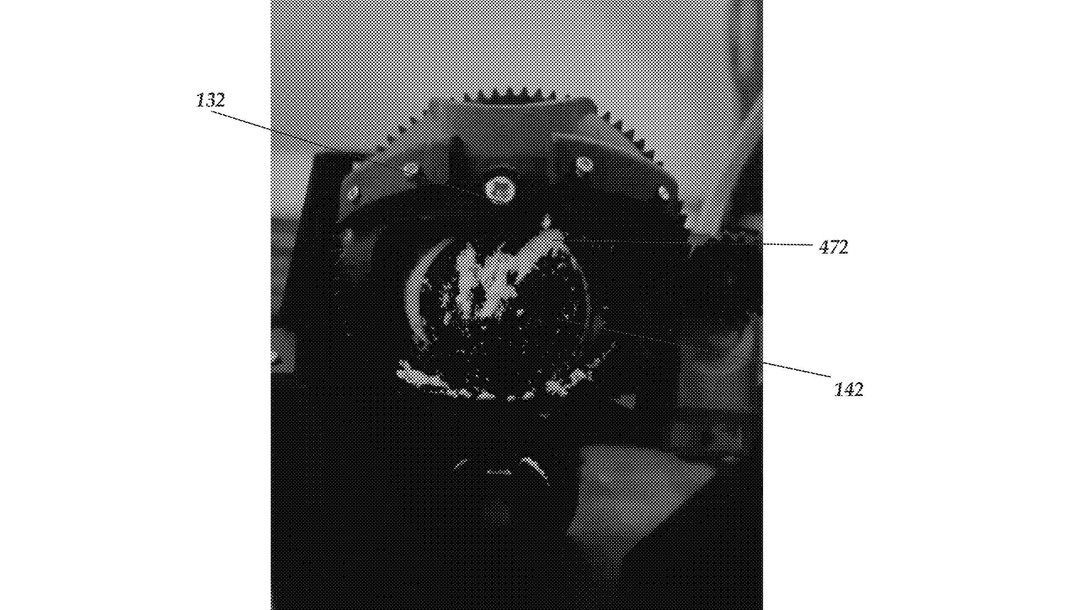
特許図面には実際の眼球に似た丸い形のレンズ構造も含まれている。設計スケッチのみならず、実物の写真とみられる資料も含まれていると報じられており、テスラがすでに機械式眼球形状の試作品を製作した可能性を示唆している。
もちろん、すべての特許が実際の量産製品につながるわけではない。しかしこの技術は、自動運転車の維持管理と直結する現実的な問題を扱っているという点で、実用化の可能性が高いとの見方がある。
テスラが最小限の人間の介入だけで車両を運行する無人ロボタクシーを実現するには、カメラの汚れを防ぐ技術が不可欠となる。特にテスラはLiDARやレーダーよりもカメラ中心のビジョンベースの自動運転アプローチを強調してきたため、カメラレンズの清潔さはシステムの信頼性に直結する。
この技術は今後Optimusにも適用される可能性が指摘されている。Optimusはカメラを頭部に内蔵した設計を採用しているが、実際の外部環境で安定して動作するにはセンサーの汚れの問題を避けられない。この場合、ロボット頭部全体を洗浄するよりも、カメラ部分のみを効率的に管理する自己洗浄システムのほうが現実的な解決策となる可能性がある。
ロボタクシーとOptimusへの展開が示す可能性
テスラの今回の特許は、自動運転とロボット技術がソフトウェアの性能だけでは完成しないことを示すものといえる。車両やロボットが自ら周囲の環境を認識するには、センサーの役割を果たすカメラをいかに清潔に保つかも、重要な技術的課題となっている。








